Arduino Programming
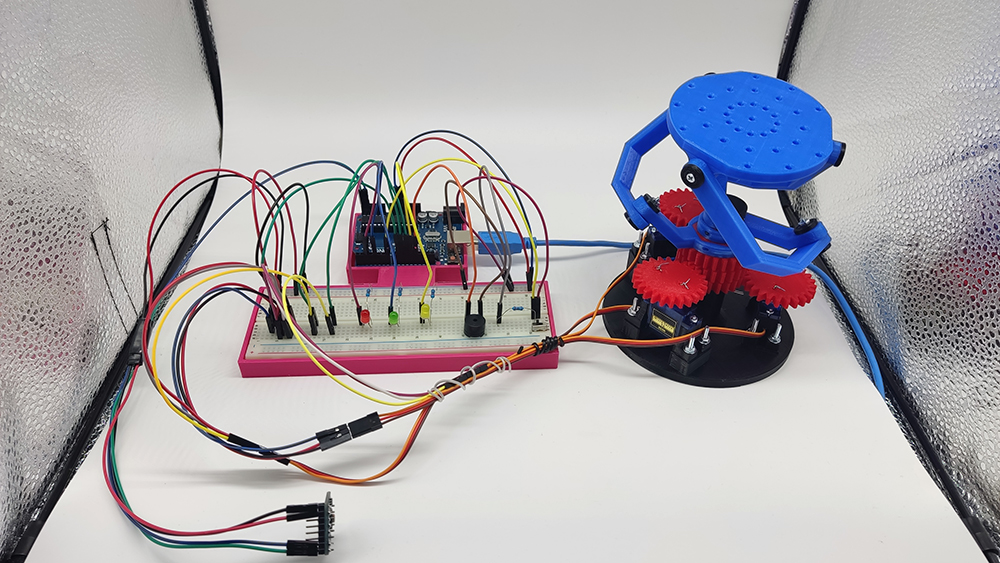
The goal of this project was to create a tilting device based on a spherical parallel actuator. The gears move the arms that will apply inclination to the top surface. This device will be moved by actuators controlled from an Arduino Uno.
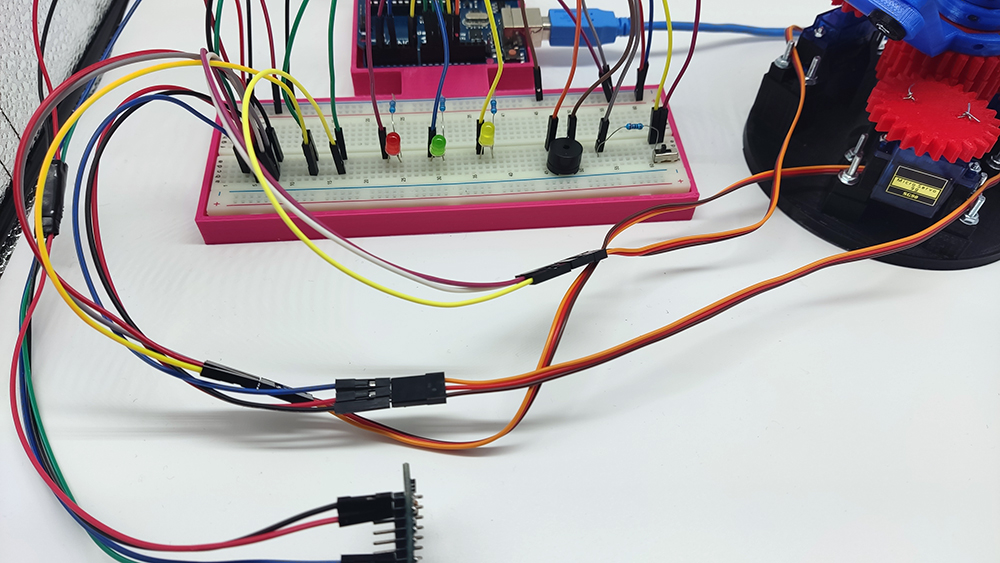
The movement of this device will be carried out using 3 servo motors, each with an applied gear wheel. The servo motors are controlled from a 3-axis accelerometer (GY-291 ADXL345). The user should handle this accelerometer, applying inclination to it according to the desired axis. The inclination of each of the axes will control each of the servo motors, which in turn will move a gear wheel that will finally apply inclination to the top surface of the device.